Mems Imu/Vru/Ahrs Sensor with Gyro Bias Instability 0.3°/H, Accelerometer Bias 20μG


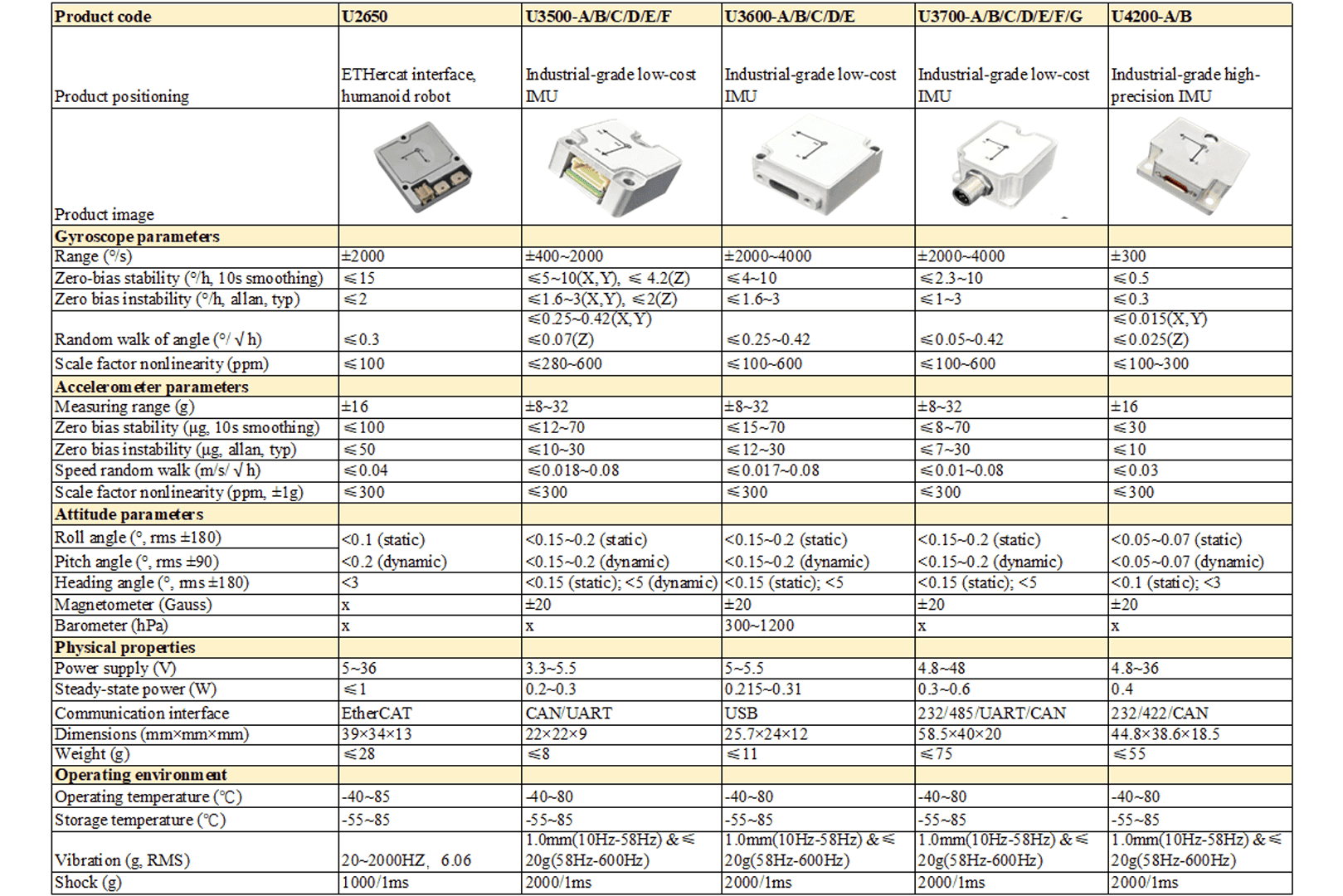
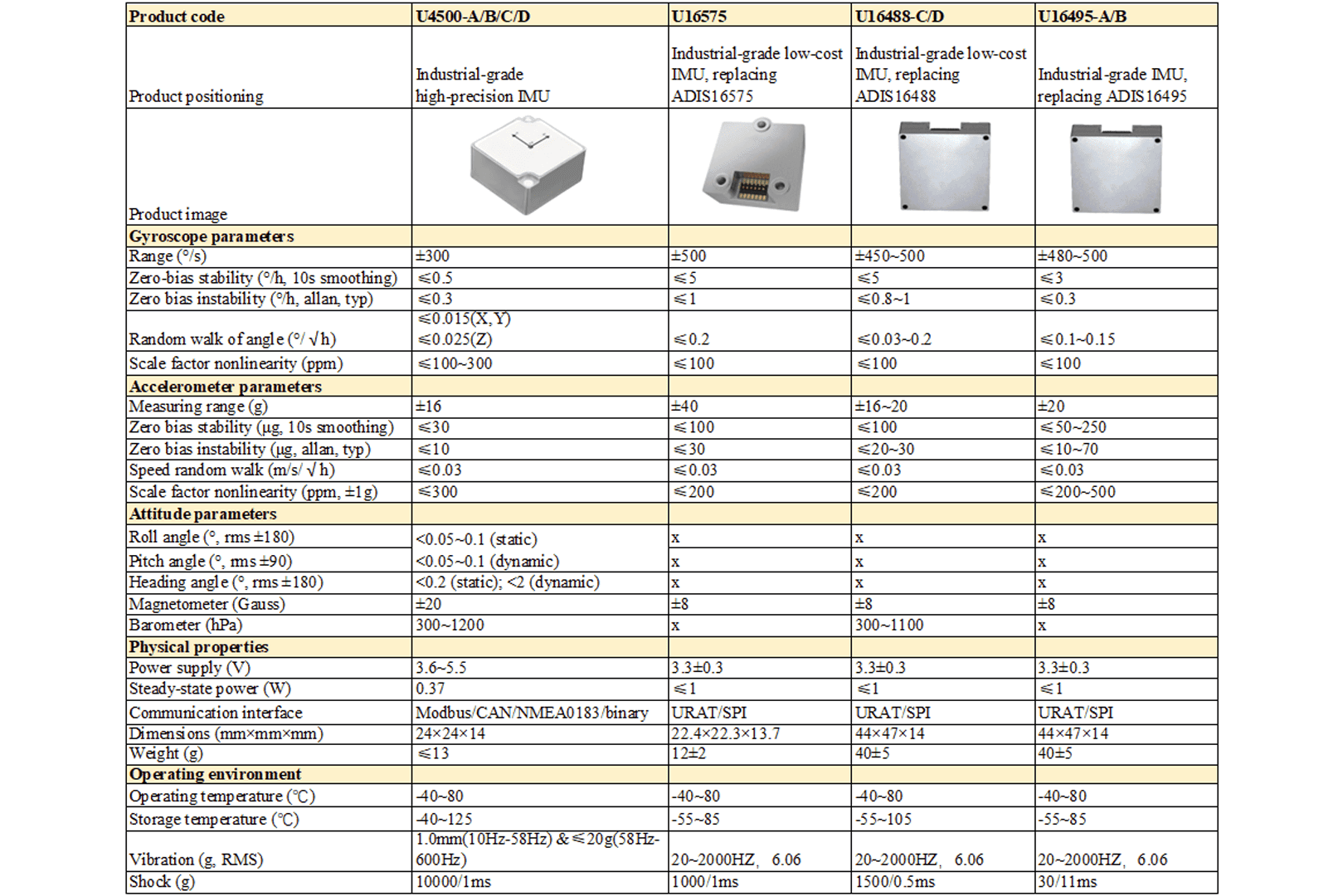
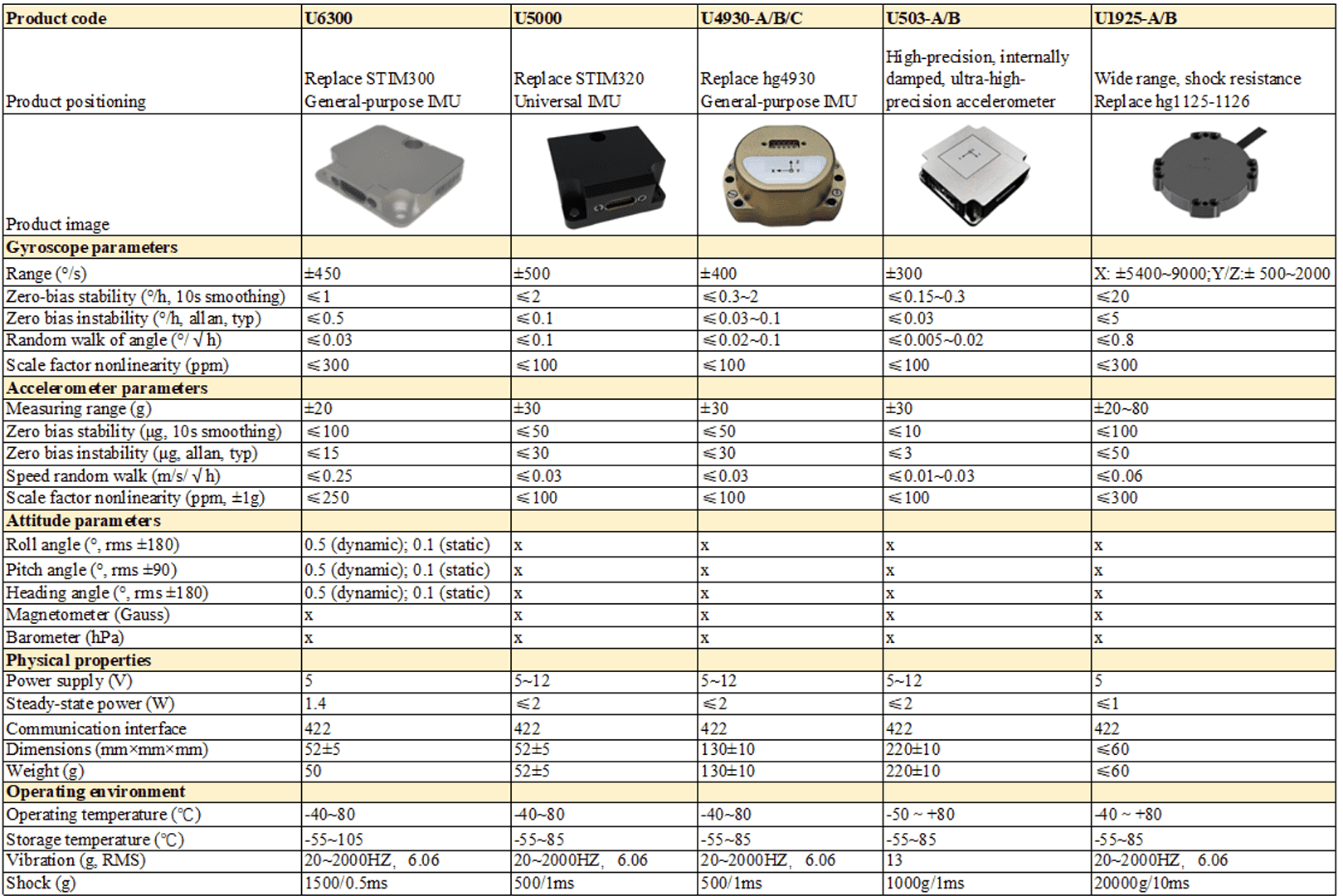
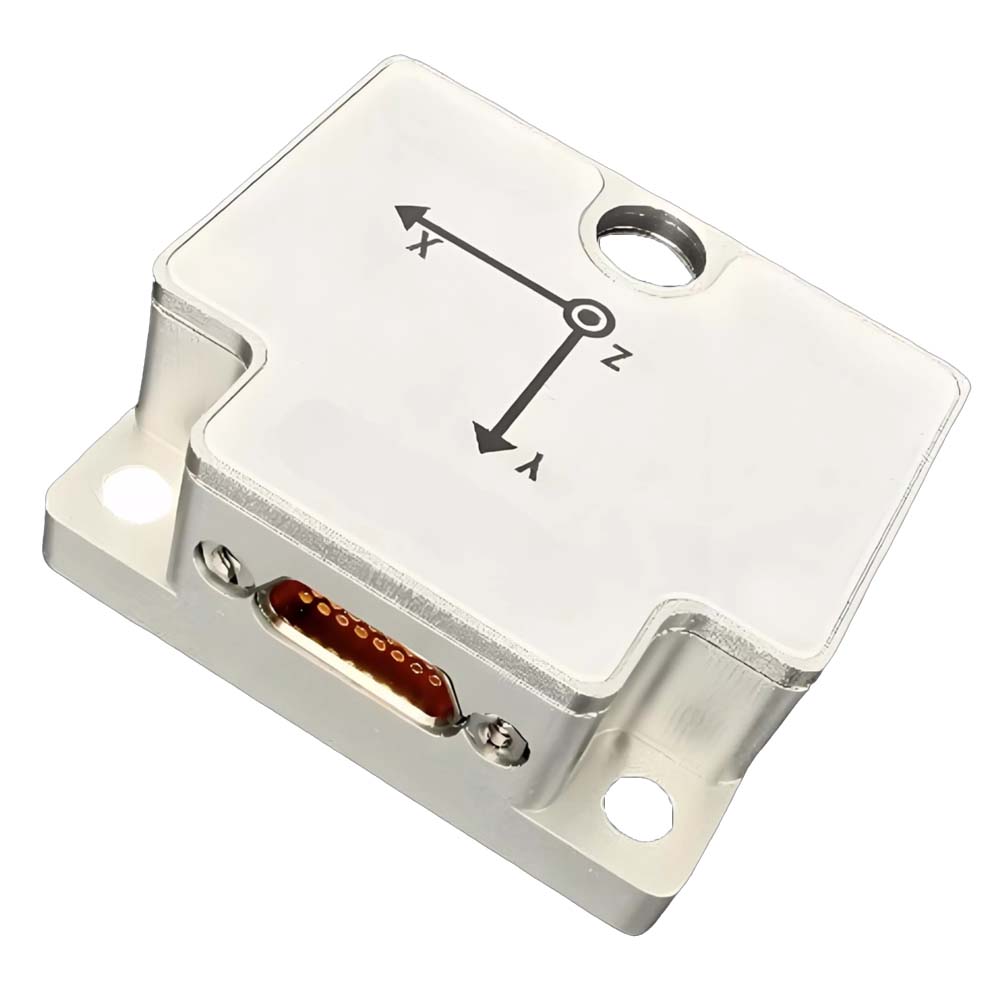
The U6488 series IMU are equipped with built - in three - axis gyroscopes and three - axis accelerometers, which are used to measure the three - axis angular rates and three - axis accelerations of the carrier. The data from the gyroscopes and accelerometers, which have undergone error compensation (including temperature compensation, installation misalignment angle compensation, nonlinear compensation, etc.), are output through a serial port according to the agreed communication protocol. They can be used for precise navigation, control, and dynamic measurement of the carrier. This product uses high - precision MEMS inertial devices, featuring small size, strong overload resistance, high reliability, and high hardness, and it is capable of accurately measuring the angular rate and acceleration information of a moving carrier even in harsh environments.
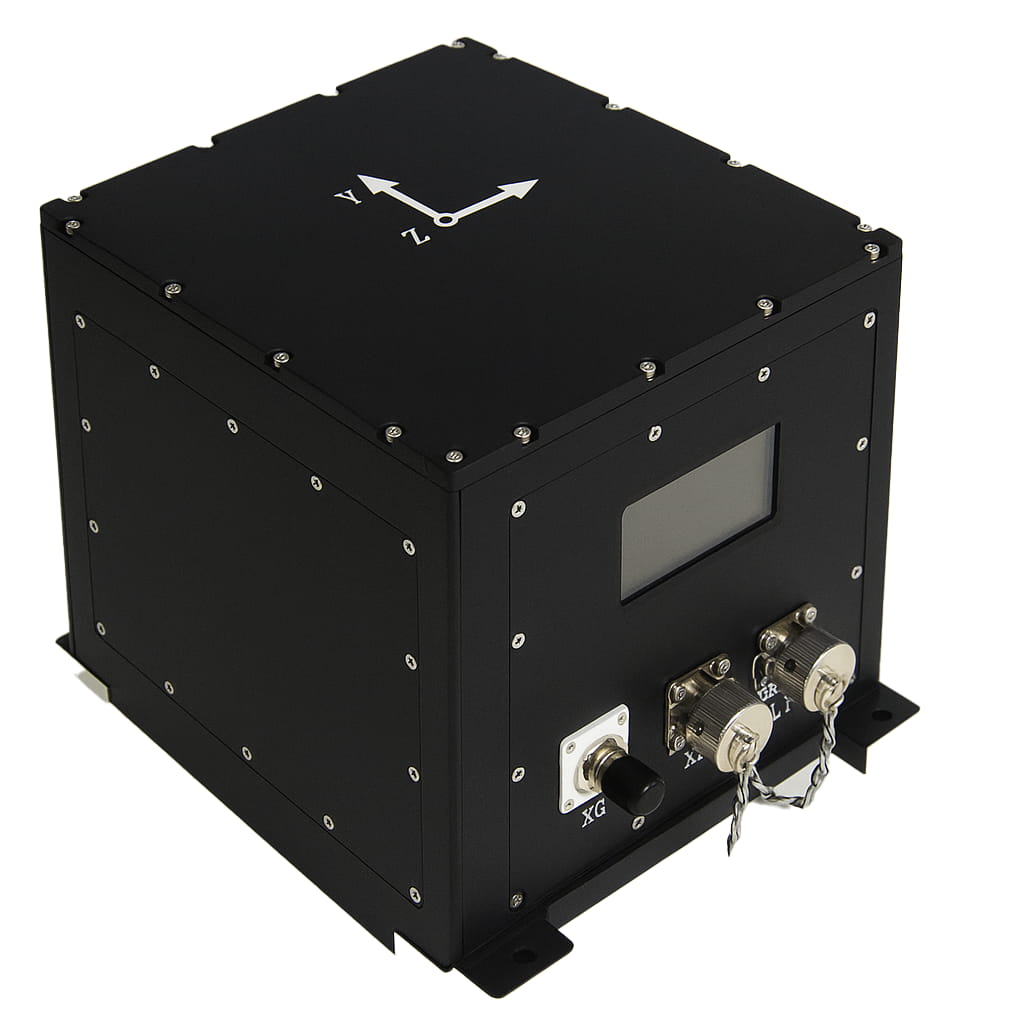
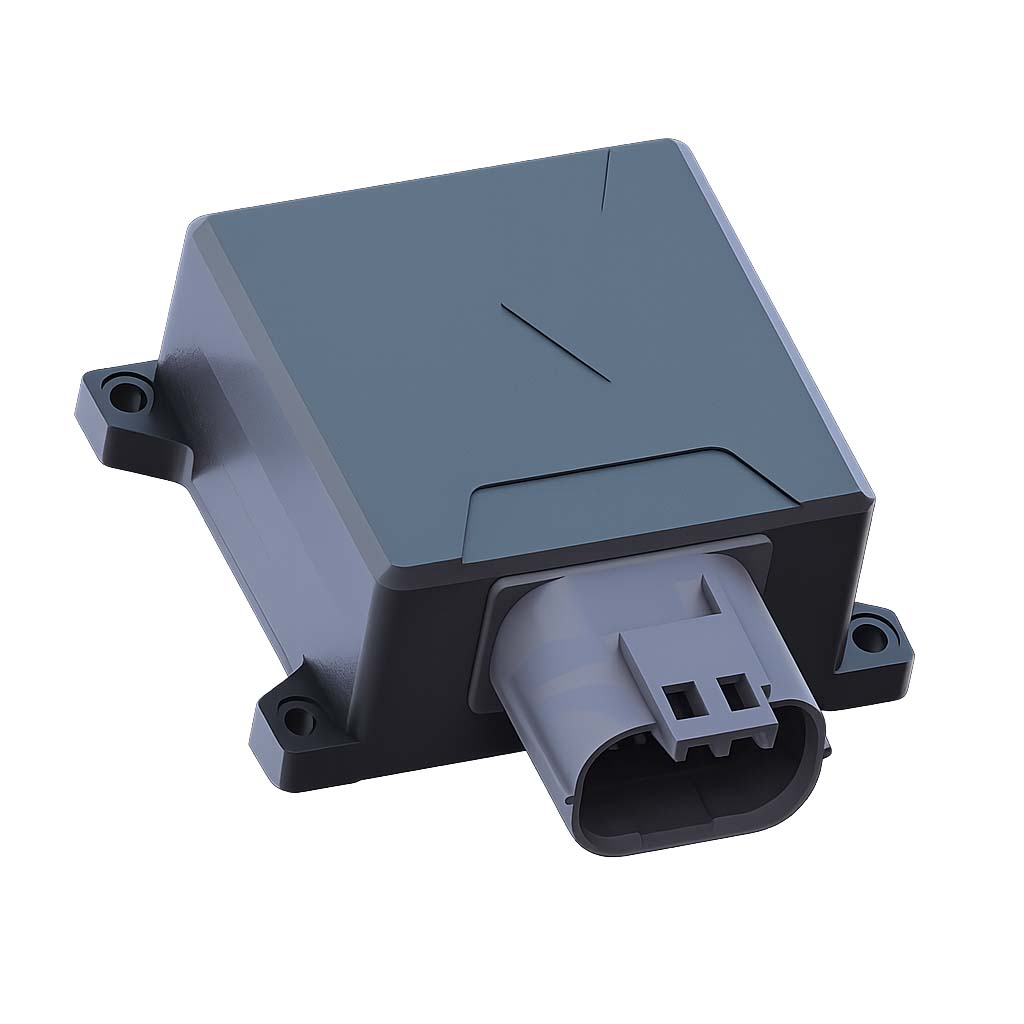
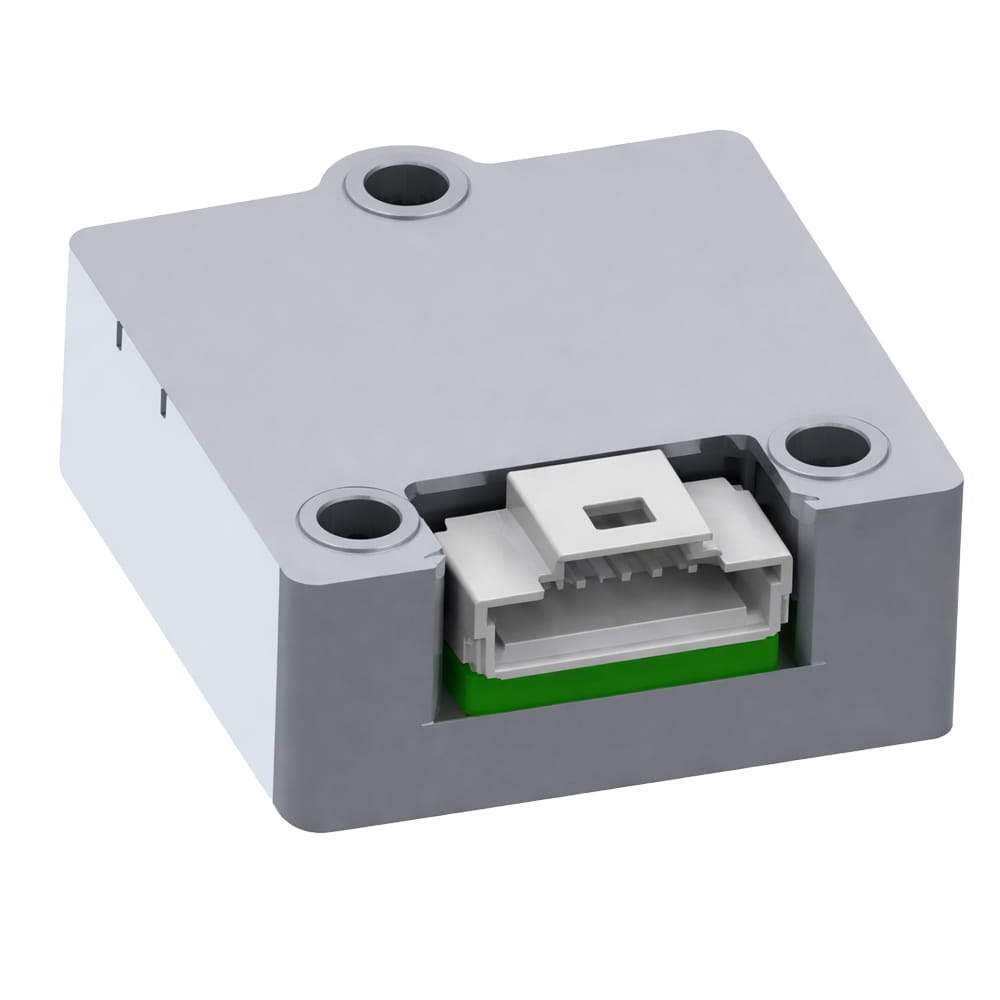
The U6488 series includes four models: U6488-B, U6488-C, U6488-D, and U6488-E. The appearance and interface performance of the four models are consistent. Except for U6488-E, all of them are equipped with built - in three - axis magnetometers and digital barometers.
Part No, :
U6488Order(MOQ) :
1Product Series and Parameters
| Parameter | U6488-A | U6488-B | Unit | |
| Gyroscopes | ||||
| Dynamic Range | ±450 | ±450 | °/s | |
| Bias Stability | Allan variance | 1 | 0.8 | °/h |
| 10s average (-40~+85°C, fixed temp.) | 4 | 5 | °/h | |
| Radom Walk | 0.1 | 0.065 | º/√h | |
| Bias Repetition | 4 | 5 | °/h | |
| Bais | Bias change at full temp. range1 | ±0.04 | ±0.05 | °/s |
| Bias change in vibration conditions2 | 6 | 6 | °/h | |
| Scale Factor Nonlinearity | 100 | 100 | ppm | |
| Resolution | 3.052*10-7 | 3.052*10-7 | º/s/LSB | |
| Bandwidth | 200 | 260 | Hz | |
| Accelerometer | ||||
| Dynamic Range | ±16 | ±20 | g | |
| Bias Stability | Allan variance | 0.03 | 0.02 | mg |
| 10s average (-40~+85°C, fixed temp.) | 0.06 | 0.05 | mg | |
| Radom Walk | 0.01 | 0.05 | m/s/√h | |
| Bias Repetition | 0.06 | 0.08 | mg | |
| Scale factor nonlinearity | 100 | 100 | ppm | |
| Resolution | 1.221*10-8 | 1.221*10-8 | g/LSB | |
| Bandwidth | 200 | 260 | Hz | |
| Magnetometer | ||||
| Dynamic Range | ±2 | ±8 | Gauss | |
| Resolution | 120 | 200 | uGauss | |
| Noise RMS | 10Hz | 50 | 50 | uGauss |
| Bandwidth | 200 | Hz | ||
| Barometer | ||||
| Pressure Range | 450 | 1100 | mbar | |
| Resolution | 0.1 | 0.1 | mbar | |
| Absolute Accuracy | 1.5 | 1.5 | mbar | |
| Communication Interface | ||||
| 1 Channel SPI | Baud rate | 25 | 25 | MHz |
| 1 Channel UART | Baud rate | 230.4 | 230.4 | Kbps |
| Sampling Rate | SPI | 2000 | 2000 | Hz |
| UART | 200 | 200 | Hz | |
| Electronic Characteristics | ||||
| Voltage | 3.3±0.3 | V | ||
| Power Consumption | 1.5 | W | ||
| Ripple Wave | P-P | 100 | mV | |
| Physical Characteristics | ||||
| Dimension | 47*44*14 | mm | ||
| Weight | 50 | grams | ||
Production process
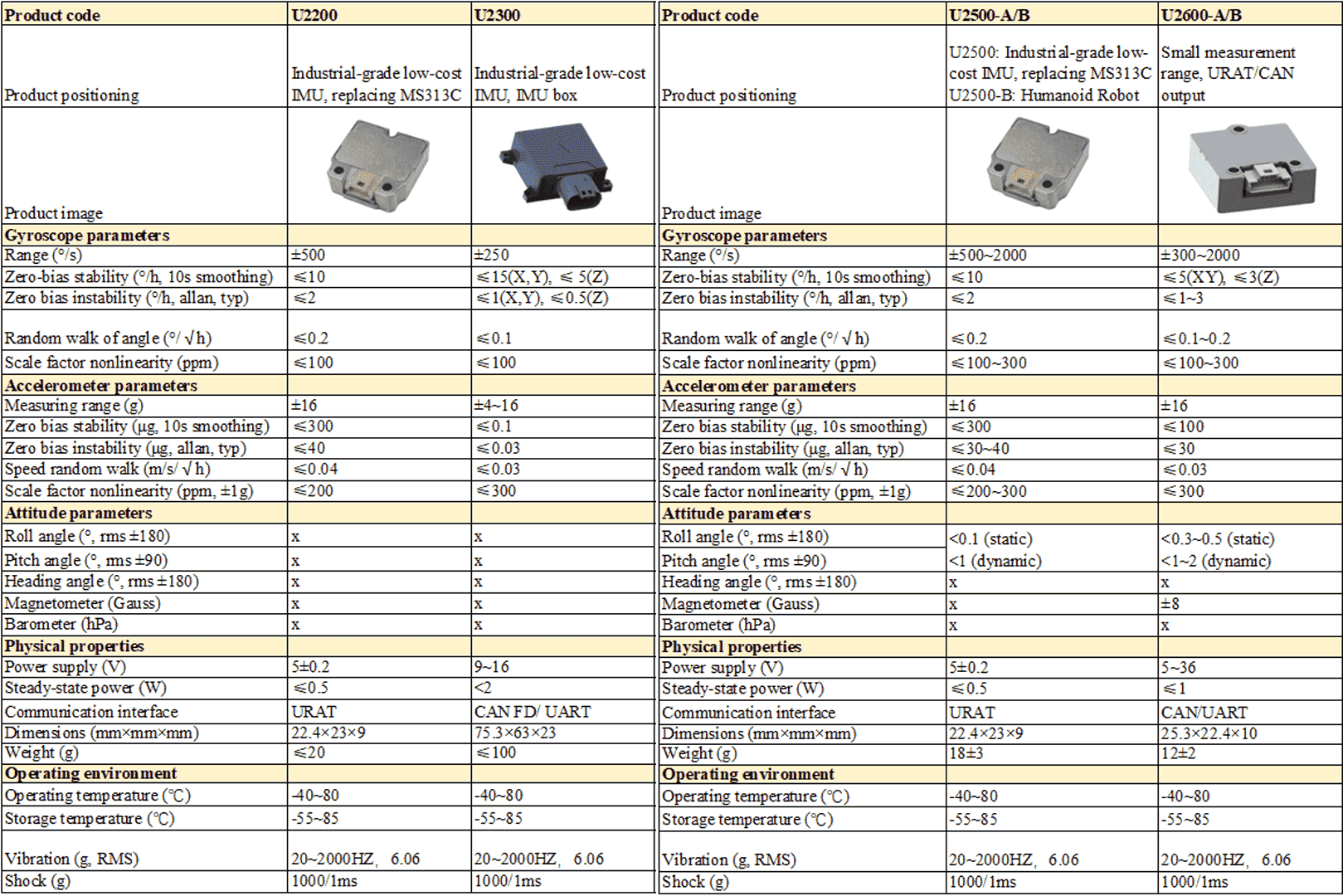
More similar products
Product dimension


Application Scenarios



FAQ














Xml Privacy Policy Blog Sitemap
copyright @ Micro-Magic Inc All Rights Reserved.
 Network Supported
Network Supported



 English
English