U4500 series sensors are composed of high-performance tactical-grade MEMS-IMU designed IMU/VRU/MRU/AHRS/INS systems, and are equipped with independently developed adaptive extended Kalman filtering, IMU noise dynamic analysis algorithms, heave estimation algorithms, carrier motion state analysis algorithms, and GNSS fusion algorithms, which can provide users with accurate position, attitude, velocity and other information.
U4500 series sensors transmit data through UART/CAN interfaces and have rich user configurations. (A transceiver needs to be connected externally for CAN)
U4500 series can synchronize with the system through external triggering, can receive UTC time, and can also align time with external systems such as radars and cameras through the synchronous output function.
A multi-functional upper computer (GUI) can help quickly evaluate the product, and these functions include but are not limited to module configuration, data display, firmware upgrade, data recording, etc.
Part No, :
U4500Order(MOQ) :
1Product Series and Parameters
| Fusion Parameters | Condition | U4500-A | U4500-B | U4500-C | U4500-D | Unit |
| Pitch /Roll)① | 0.05(nom), 0.1(max) | ° | ||||
| Resolution | 0.01 | ° | ||||
| Heading (VRU/MRU) )① | 0.2(nom), 0.3(max) | ° | ||||
| Heading (AHRS) ② | 0.5(nom), 2(max) | |||||
| Resolution | 0.01 | |||||
| Starting time | IMU/VRU | 2 | s | |||
| MRU (static) | 60 | |||||
| MRU (sea) | 180 | |||||
| Heave | / | 5/5%(nom) | cm | |||
| Heave period | 1~10(nom) | s | ||||
| Notes: ①: Turntable rotation test. ②: Measured under the condition that there is no magnetic field interference around after geomagnetic calibration, and the product needs to be configured to AHRS mode. |
||||||
| Gyroscope | Condition | U4500-A | U4500-B | U4500-C | U4500-D | Unit |
| Measurement range | ±300 | °/s | ||||
| Resolution | 16 | bit | ||||
| Linear error① | 300°/s -40℃-110℃ 100°/s -40℃-110℃ |
±0.15(nom), ±0.3(max) | °/s | |||
| Cross-axis error | ±0.15(max) | % | ||||
| 3dB Bandwidth | 235(nom), 250(max) | Hz | ||||
| Sampling rate | 1000 | Hz | ||||
| Noise density | XY: 0.0004 Z: 0.0006 |
(°/s)/√Hz | ||||
| Zero bias instability② | Allan variance | 0.3 | °/h, 1σ | |||
| Zero bias stability | 10s smooth | 0.5 | °/h, 1σ | |||
| Zero bias repeatability | 0.8 | °/h, 1σ | ||||
| Angle random walk③ | Allan variance | XY: 0.015 Z: 0.025 |
°/√Hz, 1σ | |||
| Full temperature zero bias | -40-85℃ | XY: 0.25(max) Z: 0.01(nom), 0.03(max) |
°/s | |||
| Accelerometer sensitivity | For constant gravity input | 0.00075 | °/s/g | |||
| Notes: ①: Linear error is the maximum deviation at a specified range from the best-fit line determined by the measured values. ②: The value obtained by dividing the minimum value of the Allan variance by 0.664. During measurement, a 13 Hz low-pass filter setting and a 200 Hz sampling rate are used, and there should be a 15-minute stabilization time before starting data collection to ensure complete thermal stability. ③: Angular random walk is a white noise term estimated from the Allan deviation at a time constant τ = 1 second. |
||||||
| Accelerometer | Condition | U4500-A | U4500-B | U4500-C | U4500-D | Unit |
| Measurement range | ±16 | g | ||||
| Resolution | 16 | bit | ||||
| Initial zero bias | 2 | mg | ||||
| Linear error① | 8g -40℃-110℃ | ±3(nom), ±15(max) | mg | |||
| 1g -40℃-110℃ | ||||||
| Cross-axis error | ±0.15(max) | % | ||||
| 3dB Bandwidth | 210(nom), 235(max) | Hz | ||||
| Sampling Rate | 1000 | Hz | ||||
| Noise density | 0.0008 | m/s2/√Hz, 1σ | ||||
| Zero bias instability② | Allan variance | 0.01 | mg | |||
| Zero bias stability | 10s smooth | 0.03 | mg | |||
| Zero bias repeatability | 0.04 | mg | ||||
| Angle random walk③ | Allan variance | 0.03 | m/s√h, 1σ | |||
| Full temperature zero bias | -40-85℃ | 0.5(nom), 2(max) | mg | |||
| Notes: ①: Linear error is the max deviation at a specified range from the best-fit line determined by the measured values. ②: The value obtained by dividing the minimum value of the Allan variance by 0.664. During measurement, a 13 Hz low-pass filter setting and a 200 Hz sampling rate are used, and there should be a 15-minute stabilization time before starting data collection to ensure complete thermal stability. ③: Angular random walk is a white noise term estimated from the Allan deviation at a time constant τ = 1 second. |
||||||
| Magnetometer | Condition | U4500-A | U4500-B | U4500-C | U4500-D | Unit |
| Range | / | ±20 | Gauss | |||
| Noise | / | 450 | nT | |||
| Linearity | / | 20 | uT | |||
| Temperature sensor | Condition | U4500-A | U4500-B | U4500-C | U4500-D | Unit |
| Range | -40 – 135 | ℃ | ||||
| Offset error | ±1 | ℃ | ||||
| Barometer | Condition | U4500-A | U4500-B | U4500-C | U4500-D | Unit |
| Range | / | 300 ~ 1200 | hPa | |||
| Resolution | / | 0.006 | hPa | |||
| Accuracy | / | ±0.06 | hPa | |||
| Mechanical/Environment | Condition | U4500-A | U4500-B | U4500-C | U4500-D | Unit |
| Power supply VDD | 3.6 - 5.5 | V | ||||
| Power consumption | 370(max) | mW | ||||
| VOL | 0.4(max) | V | ||||
| VOH | 2.6(min) | V | ||||
| VIL | -0.3(min), 1(max) | V | ||||
| VIH | 1.9(min), 3.6(max) | V | ||||
| Working temperature | -125 | ℃ | ||||
| Storage temperature | -165 | ℃ | ||||
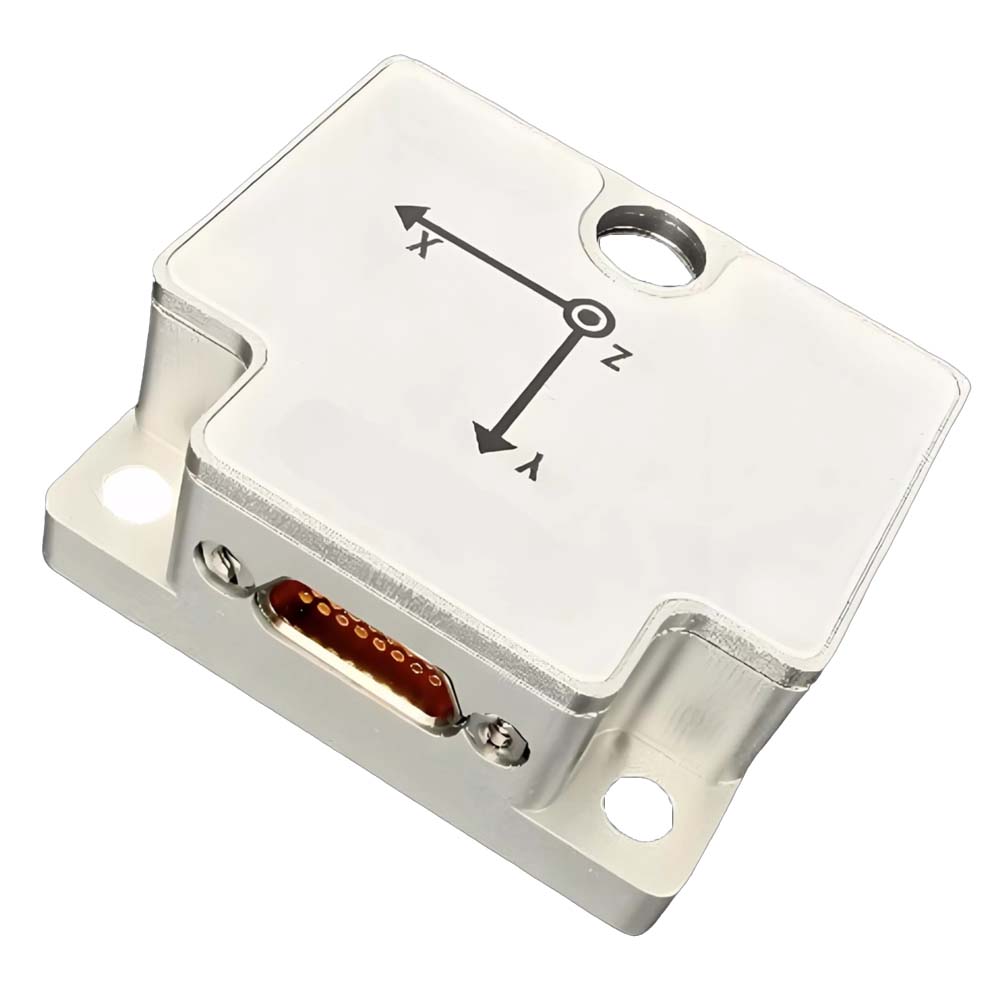
| Dimension | 24x24x14 | mm | ||||
| Shell material and process | Aluminum alloy CNC | |||||
| Environment protection | RoHS Directive 2011/65/EU | |||||
| EMC | LVD Directive 2014/35/EU | |||||
| Drop test | Free fall 3 times on a 75cm high experimental platform | |||||
| Temperature shock | Raise the temperature from -40 to 85 ℃ within 1h, 5 times | |||||
| MTBF | 30000 | h | ||||
| Mechanical impact | 10000 | g | ||||
| ESD HBM | 2KV | JEDEC/ESDA JS-001 | ||||
| Interface | Condition | Min | Normal | Max | Unit | |
| UART1/UART2 UART3 CAN |
Baud-rate | 9600 | 115200 | 921600 | bps | |
| Starting position | 0 | 100 | 1000 | Hz | ||
| 115200 | bps | |||||
| Baud-rate | 125 | 500 | 1000 | kbps | ||
| Output frame rate | 0 | 100 | 200 | Hz |
Production process
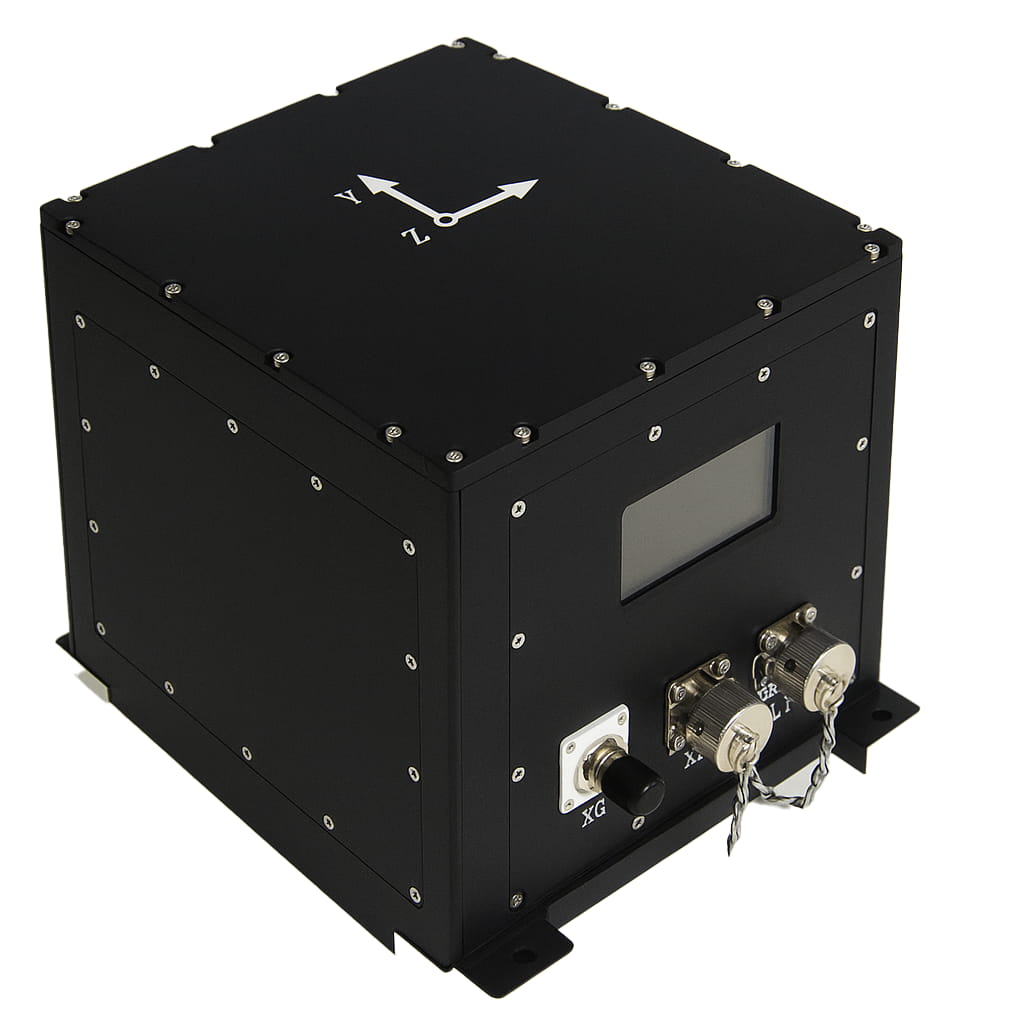
Product dimension

Application Scenarios



FAQ
1. What is the U4500 used for?
U4500 is a tactical-grade MEMS IMU / VRU / MRU / AHRS / INS sensor designed for UAV attitude reference, low-speed unmanned robots, underground instruments, active wave compensation, ship attitude control, dynamic positioning, platform stabilization, and construction machinery.
2. What interfaces does the U4500 support?
The U4500 supports UART and CAN interfaces. The CAN bus requires an external CAN transceiver for use.
3. What functions can the U4500 provide?
The U4500 integrates multiple functions including IMU, VRU, MRU, AHRS, and INS. It can output acceleration, angular velocity, geomagnetic field, air pressure, Euler angles, quaternions, heave, and, when connected to external GNSS, position, velocity, attitude, and timing information.











Xml Privacy Policy Blog Sitemap
copyright @ Micro-Magic Inc All Rights Reserved.
 Network Supported
Network Supported



 English
English