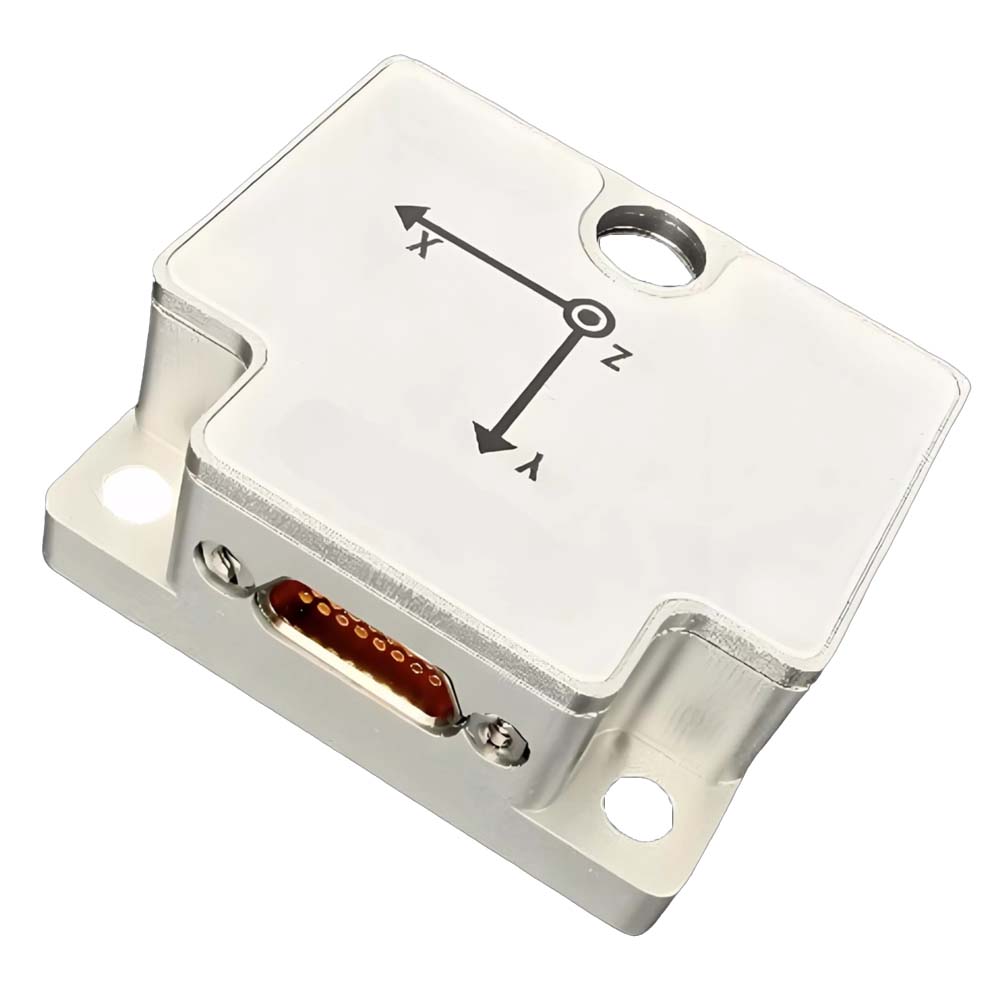
U3500 series is an IMU/VRU/AHRS sensor composed of high-performance MEMS-IMU, magnetometer, and enhanced single axis gyroscope. It is equipped with self-developed adaptive extended Kalman filter, IMU noise dynamic analysis algorithm, and carrier motion state analysis algorithm, which can meet the accuracy of attitude angle under high dynamic conditions and reduce heading angle drift.
Every sensor undergoes fine compensation including temperature, zero bias, scaling factor, and cross axis before leaving the factory.
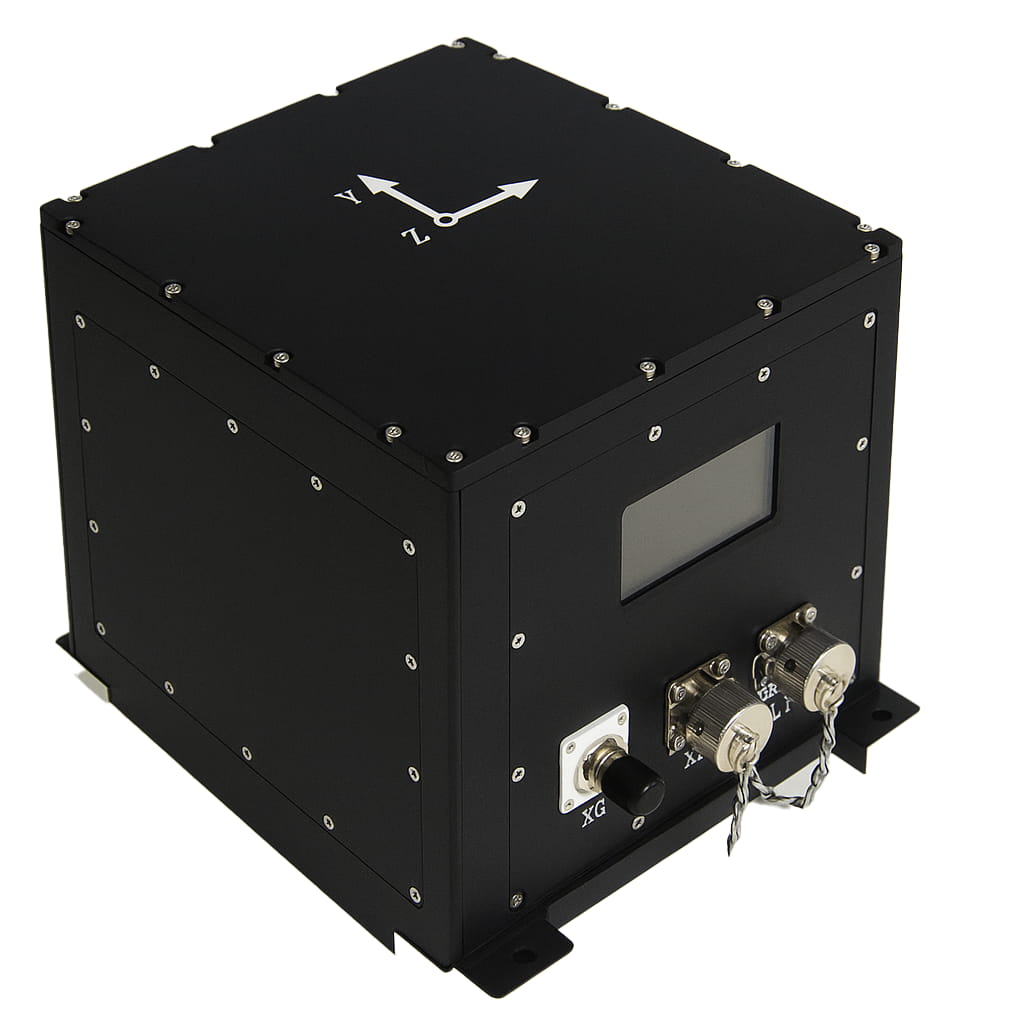
U3500 series sensors transmit data through UART interface and have rich user configurations. If a CAN interface is required, users should integrate the CAN transceiver circuit themselves. U3500 series can be synchronized with the system through external triggering, and can also align with external systems such as radar and camera time through synchronous output function. A multifunctional upper computer (GUI) can help quickly evaluate products, including but not limited to module configuration, data display, firmware upgrade, data recording, etc.
Part No, :
U3500Order(MOQ) :
1Product Series and Parameters
| Attitude Precision | U3500-A | U3500-B | U3500-C | U3500-D | U3500-E | U3500-F | Unit |
| Pitch (±90°) /Roll (±180°) (static) | 0.15(nom), 0.2(max) | ° | |||||
| Pitch (±90°) /Roll (±180°) (dynamic) | 0.15(nom), 0.2(max) | ° | |||||
| Yaw (±180°) static drift 2hrs (6DOF) ① | 0.15(nom), 0.2(max) | ° | |||||
| Yaw (±180°) dynamic drift (6DOF) ② | 9 | 5 | ° | ||||
| Magnetic assist (AHRS)③ | / | / | / | 2(nom), 3(max) |
/ | 2(nom), 3(max) |
° |
| Yaw rotation error (6DOF) (rotation under 100°/s)④ | 3(max) | <0.8(nom), 1.5(max) | 1(max) | ° | |||
| Resolution | 0.01 | ° | |||||
| Notes: | |||||||
| ①: The module was kept stationary for 2 hours. ②: The measurement was taken after the module had been moving on an indoor cleaning robot for 1 hour. 1σ ③: After geomagnetic calibration, the measurement was taken in the absence of surrounding magnetic field interference, and the product needed to be configured in AHRS mode. ④: The turntable was rotated continuously for 10 revolutions, resulting in cumulative error in the heading angle |
|||||||
| Gyroscope | U3500-A | U3500-B | U3500-C | U3500-D | U3500-E | U3500-F | Unit |
| Measurement range | ±2000 | ±400 ±2000(max) |
±4000 | °/s | |||
| Resolution | 16 | 20 | bit | ||||
| Scale factor(100°/s)① | <600(nom) 800(max) |
< 280(nom) 300(max) |
< 250(nom) 300(max) |
ppm | |||
| Nonlinearity② | ±0.05 | %Fs | |||||
| 3dB Bandwidth | 80 | 80(nom) 400(max) |
Hz | ||||
| Sampling rate | 1000 | Hz | |||||
| Zero bias instability (Allan, 1σ) | 3 | X,Y: 3 Z: 2 |
X,Y: 1.6 Z: 2 |
1.5 | °/h | ||
| Zero bias stability (10s, 1σ) | 10 | X,Y: 10 Z: 4.2 |
X,Y: 5 Z: 4.2 |
3.5 | °/h | ||
| Zero bias repeatability (1σ) | 14.5 | X,Y: 14.5 Z: 5.5 |
X,Y: 8.2 Z: 5.5 |
3 | °/h | ||
| Angle random walk (Allan, 1σ) | 0.42 | X,Y: 0.42 Z: 0.07 |
X,Y: 0.25 Z: 0.07 |
0.08 | °/√h | ||
| Full temp zero bias-40~85℃ | 0.1(nom), 0.3 (max) | ||||||
| Accelerometer sensitivity | 0.1 | 0.05 | °/s/g | ||||
| Notes: ①: Rotate the turntable 10 times in both directions and take the average measurement ②: Maximum deviation from the best fit line within the specified range |
|||||||
| Accelerometer | U3500-A | U3500-B | U3500-C | U3500-D | U3500-E | U3500-F | Unit |
| Measurement range | 12 | 8 32(max) |
g | ||||
| Resolution | 16 | 20 | bit | ||||
| Initial bias drift① | 5(max) | 2(nom) 5(max) |
mg | ||||
| Nonlinearity | 0.5 | 0.01 | %Fs | ||||
| 3dB Bandwidth | 145 | 90(nom) 400(max) |
Hz | ||||
| Sampling rate | 1600 | 1000 | Hz | ||||
| Zero bias instability (Allan, 1σ) | 0.03 | 0.018 | 0.01 | mg | |||
| Zero bias stability (10s, 1σ) | 0.07 | 0.035 | 0.012 | mg | |||
| Zero bias repeatability (1σ) | 0.24 | 0.13 | 0.09 | mg | |||
| Angle random walk (Allan, 1σ) | 0.08 | 0.04 | 0.017 | m/s/√h | |||
| Full temp zero bias-40-85℃ | 3(nom) ~10(max) | mg | |||||
| Notes: ①: This value will change after the user installs it, and the actual value shall prevail. |
|||||||
| Magnetometer | U3500-A | U3500-B | U3500-C | U3500-D | U3500-E | U3500-F | Unit |
| Range | / | / | / | 20 | / | 20 | Gauss |
| Sampling | / | / | / | 200 | / | 200 | Hz |
| Linearity | / | / | / | 0.1 | / | 0.1 | Fs% |
| Temperature Sensor | U3500-A | U3500-B | U3500-C | U3500-D | U3500-E | U3500-F | Unit |
| Range | -104(min) – 150(max) | ℃ | |||||
| Offset error | ±1 | K | |||||
| Mechanical/Environment | U3500-A | U3500-B | U3500-C | U3500-D | U3500-E | U3500-F | Unit |
| Power supply | 3.3 - 5.5/ 6.5(max) | V | |||||
| IO To GND | -0.3 ~ 5 | V | |||||
| Power consumption | 240 | 245 | 300 | 200 | mW | ||
| Working/Storage temperature | -40 ~ +85 | ℃ | |||||
| Gyroscope range | ±2000 | Z: ±400① XY: ±2000 |
±2000(nom) ±4000(nom) |
°/s | |||
| Accelerometer range | ±12(nom) ±24(max) |
±8(nom) ±32(max) |
g | ||||
| Starting time② | 2 | s | |||||
| Size | Molex interface: 22*22*10 Board-to-board interface: 22*22*9 |
mm | |||||
| Weight | <8 | g | |||||
| Shell material and process | Aluminum alloy CNC | ||||||
| Assembling screws | M2.5 | ||||||
| Connector model | Molex connector:Molex 5015680807 Board to board connector: 2x8P pin spacing of 1mm |
||||||
| Anti-Vibration | 1.0mm(10Hz-58Hz) &≤20g(58Hz-600Hz) | ||||||
| Shock (duration <1ms) | 2000 | g | |||||
| Environment protection | RoHS Directive 2011/65/EU | ||||||
| EMC | LVD Directive 2014/35/EU | ||||||
| Drop test | Free fall 3 times on a 75cm high experimental platform | ||||||
| Temperature shock | Raise the temperature from -40 to 85 ℃ within 1h, 5 times | ||||||
| Notes: ①: U3500-B/C/D are equipped with a high-vibration-resistance single-axis gyroscope, and it performs best when the range is <400°/s. ②: The startup time refers to the time from when the system is powered on to when valid data is output. During this period, the module should be kept stationary. |
|||||||
| Interface | Parameter | Condition | Min | Normal | Max | Unit |
| UART (TTL) | Baud-rate | 9600 | 115200 | 921600 | bps | |
| Starting position | 0 | 1 | bit | |||
| Data length | 0 | 8 | bits | |||
| Stop bit | 1 | bit | ||||
| Checksum | None | bit | ||||
| Output frame rate① | 0 | 100 | 1000 | Hz | ||
| Logic voltage | High Low |
2 | 3.3 | 3.6 0.6 |
V | |
| CAN | Baud-rate② | 125 | 500 | 1000 | kbps | |
| Output frame rate③ | 5 | 100 | 200 | Hz | ||
| Logic voltage | High Low |
2 | 3.3 | 3.6 0.6 |
V | |
| IO | Logic voltage | High Low |
2 | 0.6 | V | |
| Delay (trigger function)④ | fr trigger generation to data transmission | 800 | us | |||
| Notes: ①: The sensor supports data output at 1, 5, 10, 50, 100, 200, 250, 500, and 1000Hz. ②: The baud rates supported by CAN communication are 125K, 250K, 500K, and 1000K. ③: The sensor's CAN communication supports data output at 5, 10, 50, 100, 200, and 1000Hz. ④: For multi-functional IO operations and configurations, please refer to the instruction and programming manual. |
||||||
Production process
More similar products
Product dimension

Application Scenarios



FAQ














Xml Privacy Policy Blog Sitemap
copyright @ Micro-Magic Inc All Rights Reserved.
 Network Supported
Network Supported



 English
English