I6700 MEMS High Precision Integrated INS/GNSS Navigation System RTK Dual Antenna 200Hz Output 9-36V ≤4W

The I6700 series MEMS integrated navigation system is a high-precision, high-reliability, and cost-effective MEMS inertial integrated navigation system, which can be widely used in navigation, control, and measurement fields represented by vehicles, ships, and drones.
The I6700 series integrated navigation system integrates high-performance MEMS gyroscopes, MEMS accelerometers, and GNSS satellite receiver chips. By sensing the Earth's rotation angular rate and acceleration, it achieves true heading of the current carrier's motion through static self-alignment, and integrates with the three-dimensional velocity, position, and heading obtained from the satellite GNSS receiver for integrated navigation. The integrated navigation system performs temperature drift of zero bias compensation and full-temperature scale compensation on the internal IMU module to ensure product reliability.
The product offers various configuration modes to accommodate different carriers, such as airborne, vehicular, and shipborne. Appropriate scenario modes help ensure long-term measurement accuracy of the carrier's attitude.
Part No, :
I6700Order(MOQ) :
1Product Series and Parameters
| Parameter | Technical Indicators | ||
| I6700-A | I6700-B | I6700-C | |
| Gyroscope | |||
| Range(°/s) | ±200 | ±400 | ±300 |
| Full-temperature zero bias(°/h,3σ) | ≤0.3 | ≤2 | ≤80 |
| Zero bias stability(°/h,10s ) | ≤0.1 | ≤0.5 | ≤3 |
| Zero bias instability(°/h,allan,typ) | ≤0.02 | ≤0.05 | ≤0.5 |
| Zero bias repeatability(°/h) | ≤0.1 | ≤0.3 | ≤3 |
| Angle random walk(°/√h) | ≤0.01 | ≤0.02 | ≤0.025 |
| Scale factor nonlinearity(ppm) | ≤100 | ≤100 | ≤100 |
| Axis cross-coupling(rad) | ≤0.001 | ≤0.001 | ≤0.001 |
| Bandwidth(Hz) | ≥50 | ≥200 | ≥200 |
| Accelerometer | |||
| Range(g) | ±10 | ±30 | ±20 |
| Full-temperature zero bias(mg,3σ) | ≤0.5 | ≤2 | ≤2 |
| Zero bias stability(μg,10s) | ≤20 | ≤50 | ≤50 |
| Zero bias instability(μg,allan,typ) | ≤10 | ≤30 | ≤30 |
| Zero bias repeatability(ug) | ≤20 | ≤50 | ≤60 |
| Velocity Random Walk(m/s/√h) | ≤0.02 | ≤0.03 | ≤0.04 |
| Scale factor nonlinearity(ppm,±1g) | ≤100 | ≤100 | ≤100 |
| Axis cross-coupling(rad) | ≤0.001 | ≤0.001 | ≤0.001 |
| Bandwidth(Hz) | ≥50 | ≥200Hz | ≥200 |
| Navigation Accuracy | |||
| North seeking accuracy (°,1σ) | ≤0.5 | ≤3 | / |
| Pure inertial accuracy after loss of lock(1σ,60s,Ignoring initial error) | ≤3m/60s | ≤5m/60s | ≤10m/60s |
| Heave measurement accuracy | ≤5cm | ≤5cm | ≤5cm |
| Combined Horizontal position (m,1σ) | ≤2(single point) | ≤2(single point) | ≤2(single point) |
| ≤0.02+1ppm(RTK) | ≤0.02+1ppm(RTK) | ≤0.02+1ppm(RTK) | |
| Combined Skyward position (m,1σ) | ≤3(single point), | ≤3(single point), | ≤3(single point), |
| ≤0.03+1ppm(RTK) | ≤0.03+1ppm(RTK) | ≤0.03+1ppm(RTK) | |
| Combined Horizontal velocity (m/s,1σ) | ≤0.05 | ≤0.05 | ≤0.05 |
| Combined Skyward velocity (m/s,1σ) | ≤0.1 | ≤0.1 | ≤0.1 |
| Combined Heading(°,1σ,real-time) | ≤0.1(2m baseline dual-antenna) | ≤0.1(2m baseline dual-antenna) | ≤0.1(2m baseline dual-antenna) |
| ≤0.15(single point, dynamic) | ≤0.15(single point, dynamic) | ≤0.2(single point, dynamic) | |
| ≤0.05(RTK,dynamic) | ≤0.05(RTK,dynamic) | ≤0.1(RTK,dynamic) | |
| ≤0.03(post-processing) | ≤0.03(post-processing) | ≤0.05(post-processing) | |
| Combined Horizontal attitude (°,1σ,real-time) | ≤0.015(single point, dynamic) | ≤0.015(single point, dynamic) | ≤0.05(single point, dynamic) |
| ≤0.01(RTK,dynamic) | ≤0.01(RTK,dynamic) | ≤0.03(RTK,dynamic) | |
| ≤0.007(post-processing) | ≤0.007(post-processing) | ≤0.01(post-processing) | |
| Physical Characteristics | |||
| Power supply(V) | 9~36 | ||
| steady-state power(W) | ≤4 | ||
| Startup time(s) | ≤2 | ||
| Data Rate(Hz,max) | 200 | ||
| Size(mm×mm×mm) | 87×72×56 | ||
| Weight(g) | 370±20 | ||
| Operating Environment | |||
| Operating temperature(℃) | -40~+80 | ||
| Storage temperature(℃) | -55~+85 | ||
| Vibration(g,RMS) | 20~2000HZ,6.06 | ||
| Shock(g) | 500g/1ms | ||
Production process
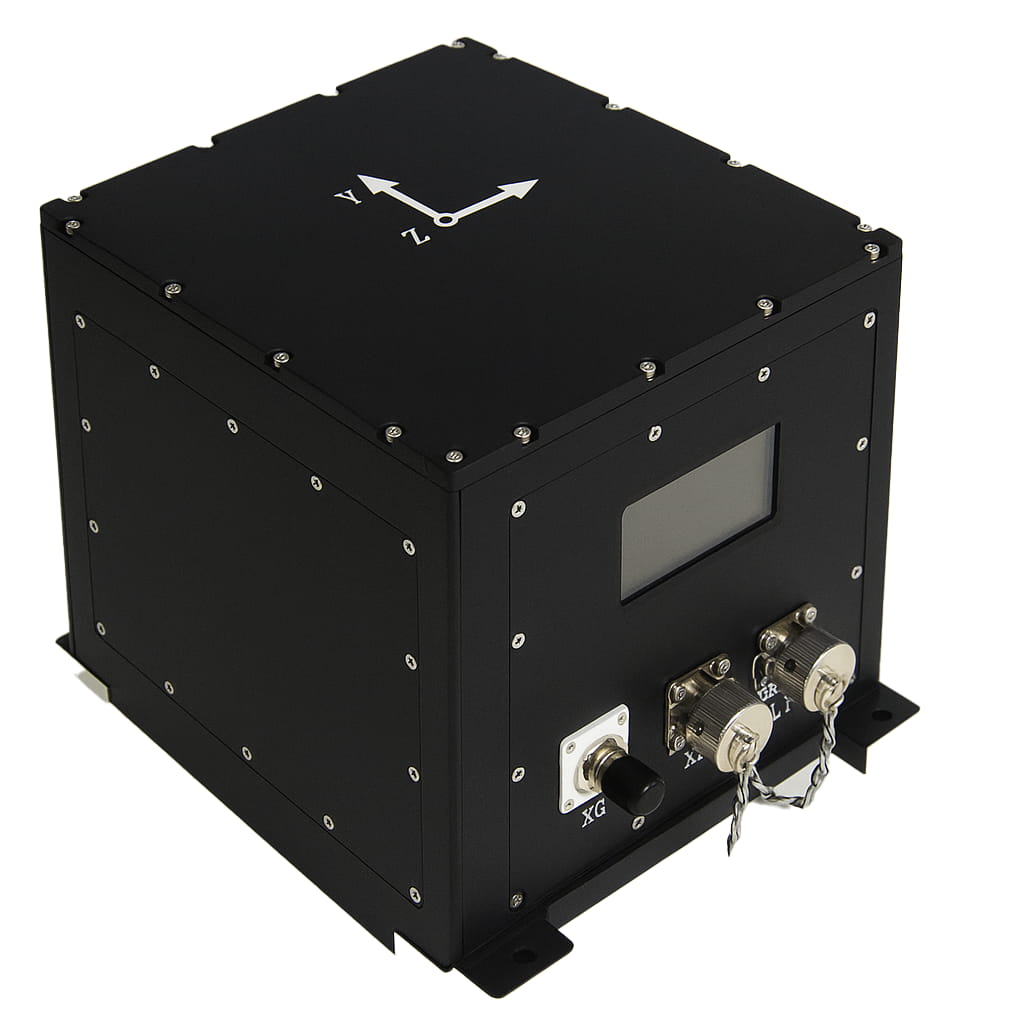
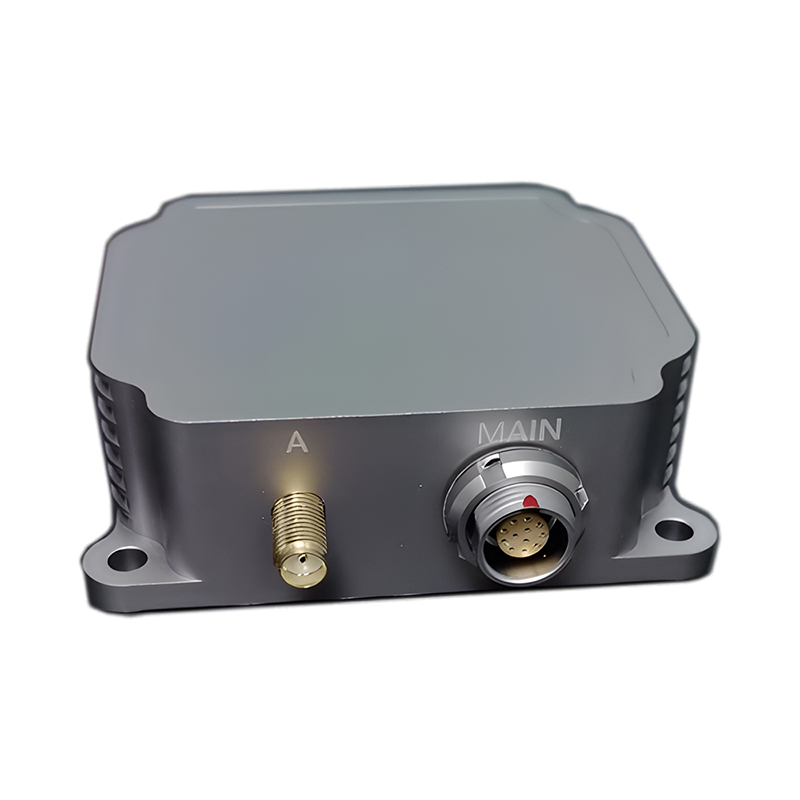
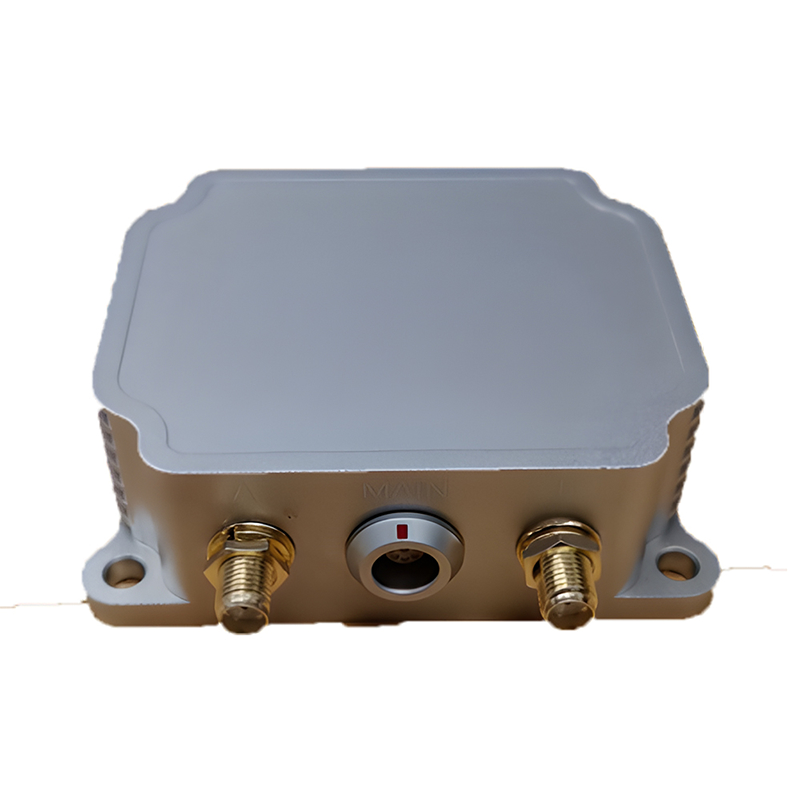
Product dimension


Application Scenarios



FAQ






Xml Privacy Policy Blog Sitemap
copyright @ Micro-Magic Inc All Rights Reserved.
 Network Supported
Network Supported



 English
English