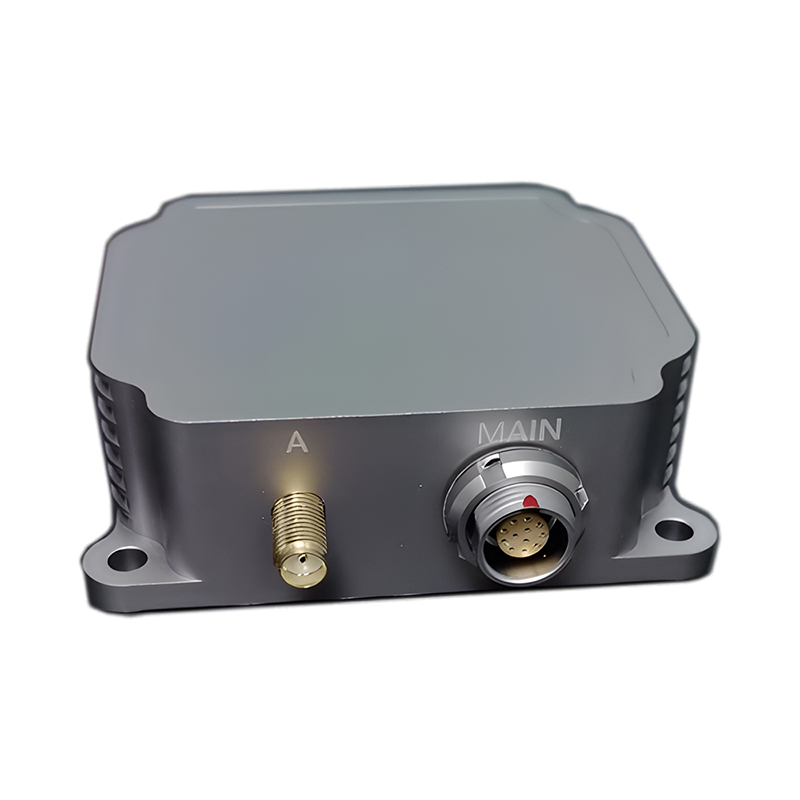
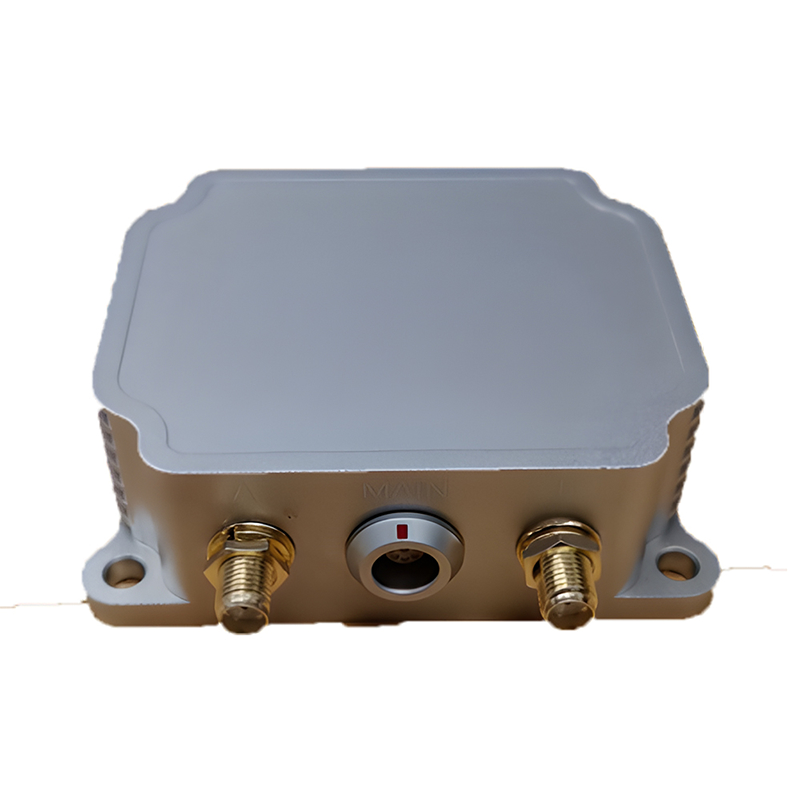
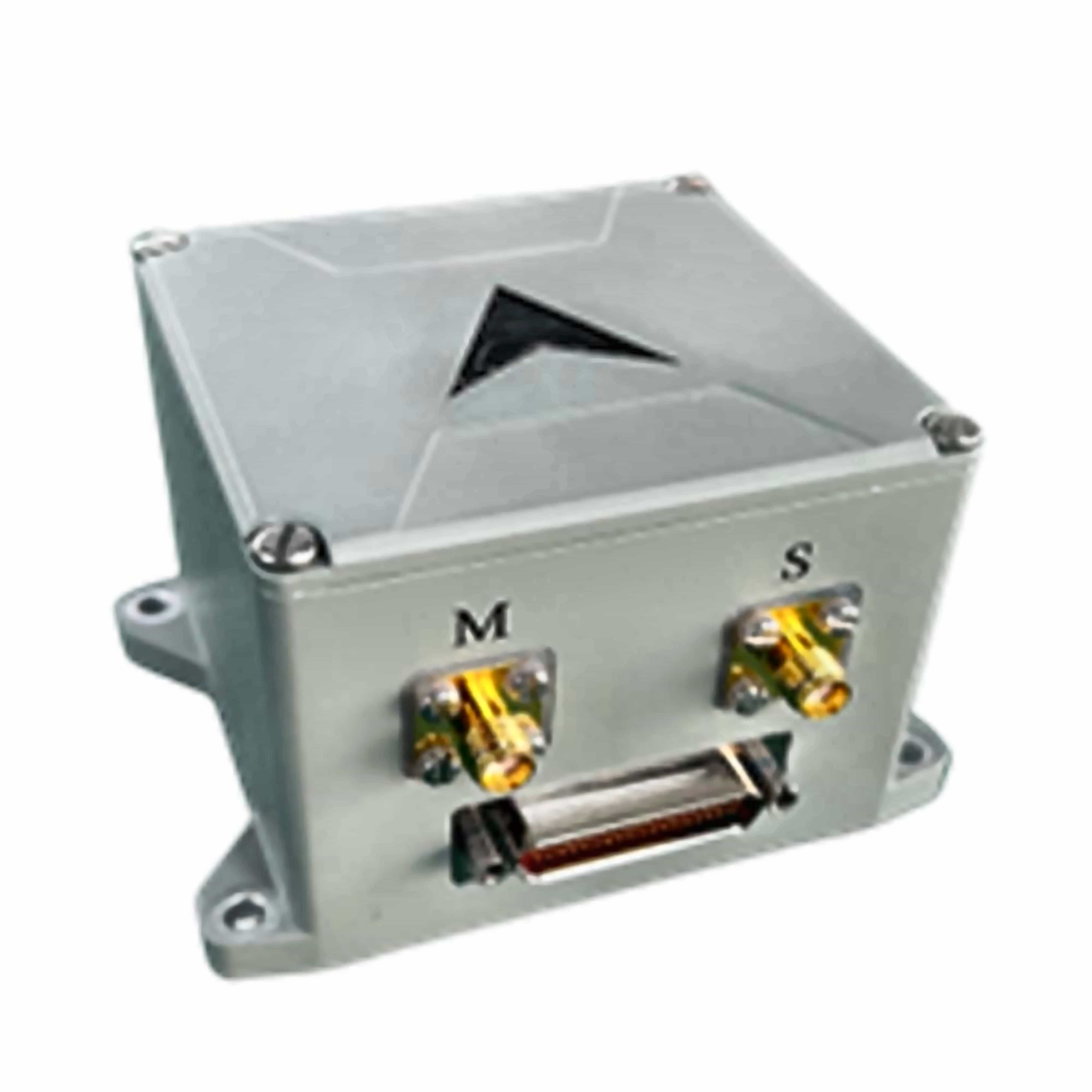
Dual-Antenna RTK GNSS/INS Integrated Navigation System | 1cm RTK | 0.1° Heading | 200Hz | Ethernet/CAN/RS232

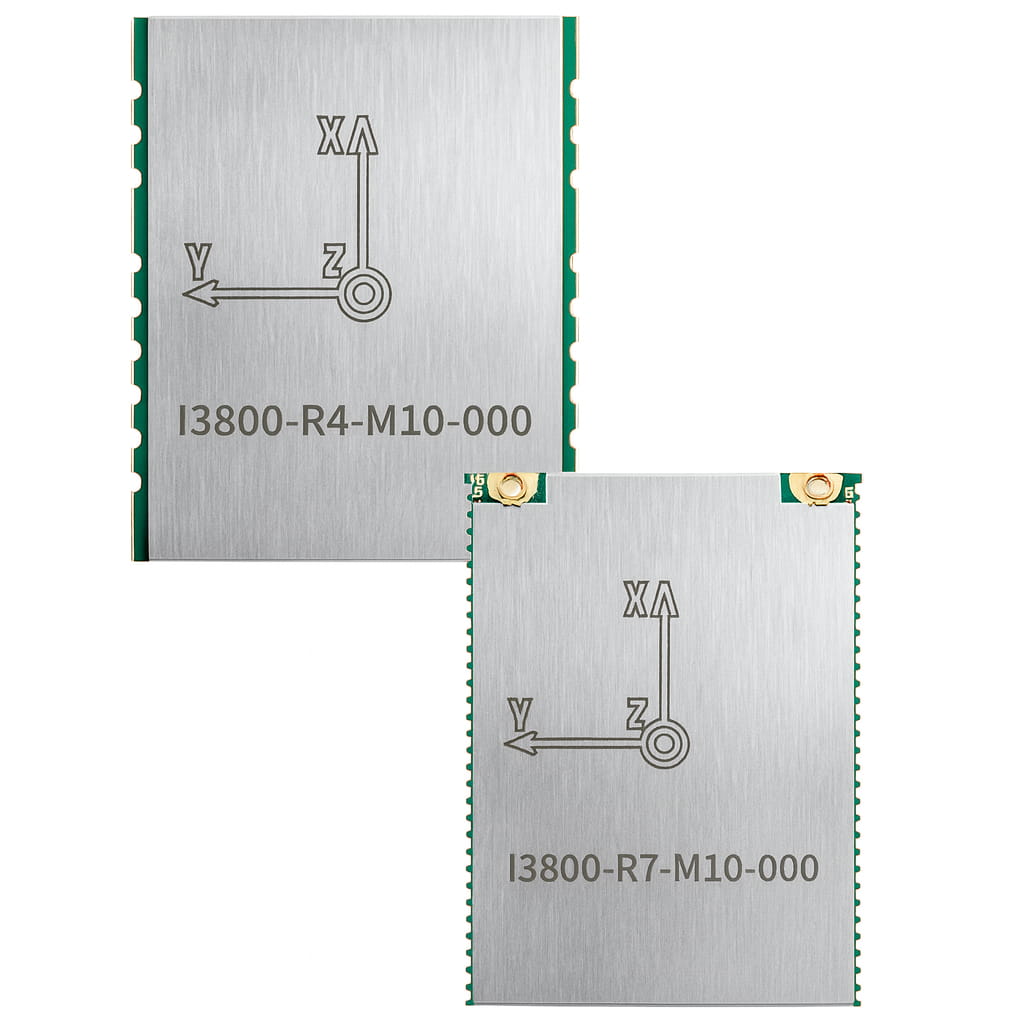
The I6000 is a module - level MEMS integrated navigation system independently developed by Lins Technology. It incorporates a MEMS IMU (Inertial Measurement Unit) and a high - precision dual - antenna GNSS. Utilizing a multi - source Kalman filter fusion algorithm, it can provide continuous and reliable high - precision positioning and navigation information in complex environments. The product is widely applied in fields such as s6atellite communication, drones, surveying and mapping, and intelligent driving.
Product Features
⚪ Support full-system multi-frequency points of BDS, GPS, GLONASS, Galileo and QZSS, and support the Beidou-3 satellite system
⚪ IMUs have calibrated in factory
⚪ Adaptive static/dynamic alignment
⚪ Configurable universal vehicle motion information (such as ODM) interface
⚪ Adaptive compensation for system installation errors and ODM scale errors
⚪ The horizontal position accuracy can be within 0.2%×D with GNSS outage①
⚪ Up to 32GB internal storage(optional)
Application
⚪ Autonomous driving
⚪ Platform stability and control
⚪ Automated machinery
⚪ Robot control
Part No, :
I6000Order(MOQ) :
1Product Series and Parameters
| Parameters | Typical | Description | |
| Start Time | GNSS cold start | <25 s | |
| GNSS RTK initialization time | <5 s | ||
| Alignment time of integrated navigation | <60 s | Dual antennas in an open sky, including cold start. | |
| Satellite signal tracking | Frequency point | BDS B1I/B2I | |
| GPS L1/L2 | |||
| GLONASS L1/L2 | |||
| GALILEO E1/E5b | |||
| Heading accuracy | GNSS effective | 0.1 ° | Dual - antenna with a 2m baseline; single - antenna requires dynamic alignment |
| Keep accuracy | 0.15 °/min | GNSS failure | |
| Attitude accuracy | GNSS effective | 0.1 ° | RTK/Single-Point Dual- Frequency |
| Keep accuracy | 0.1 ° | GNSS outage 5 minutes | |
| Horizontal positioning accuracy | GNSS effective | 1.2 m | Single point with dual frequency |
| 1 cm + 1 ppm | RTK | ||
| Keep accuracy | 0.1% × D | With odometer, 60 km/h, within 120 s | |
| Horizontal velocity accuracy | GNSS effective | 0.03 m/s | |
| Time service accuracy | GNSS effective | 20 ns | |
| Gyroscope | Range | ±400 °/s | |
| Bias instability | 0.5 °/h | Allan variance | |
| Scale factor nonlinear | 100 ppm | ||
| Accelerometer | Range | ±20g | |
| Bias instability | 20ug | Allan variance | |
| Scale factor nonlinear | 100 ppm | ±1 g | |
| Output Frequency | GNSS result | 10 Hz | Position/ Speed/ Heading/ Original data information |
| IMU Original data | 200 Hz | ||
| INS result | 200 Hz | ||
| Communication interface | RS-232 | 4 Chanels | 2 for INS、2 for GNSS |
| PPS | 1 Chanel | ||
| Event | 1 Chanel | ||
| CAN | 2 Chanels | Data protocol is customized | |
| 100M Ethernet | 1 Chanel | ||
| Electrical characteristics | Voltage | 9 ~ 36 VDC | |
| Power consumption | ≤ 6 W | ||
| Mechanical characteristics | Size | 98 × 94 × 31 mm | Excluding the dimensions of connectors |
| < 98 × 102 × 31 mm | Including the dimensions of connectors | ||
| Weight | ≤ 310 g | ||
| Environment characteristics | Working Temperature | -40 ℃ ~ +85 ℃ | |
| Storage Temperature | -55 ℃ ~ +95 ℃ | ||
| Vibration | 6.06g 20~2000 Hz | ||
| Shocking | 40 g 11 ms | ||
| Note: | |||
| Indicators without statistical methods are RMS statistics; | |||
Production process
Product dimension

Application Scenarios



FAQ





Xml Privacy Policy Blog Sitemap
copyright @ Micro-Magic Inc All Rights Reserved.
 Network Supported
Network Supported



 English
English